烟台中集来福士针对国家第七代超深水钻井平台超大模块合拢变形控制难度大等问题,开展撑管合拢口反变形设置与控制、上船体合拢反变形设置与控制技术研究,实现第七代超深水钻井平台高精度合拢。积极引入工程研究中心DACS- PointCloud点云测量与逆向建模软件及徕卡三维激光扫描仪。

来福士GM4D-H1305现场照片↑

来福士GM4D-H1305现场照片↑
DACS- PointCloud点云测量与逆向建模软件介绍
DACS-PointCloud点云测量与逆向建模软件为工程研究中心在积累大量用户需求、经过大量现场使用验证的专业软件。能够处理GB数量级的三维点云数据,运行速度快、精度高、操作方便,是一套专业点云处理分析、逆向建模软件,将扫描的密集三维坐标数据(点云)导入此系统后,对点云数据进行处理,可实现一键进行点实体与设计模型的整体偏差对比、以及逆向建模、动静态干涉检测等,可处理多种点云场景的问题。
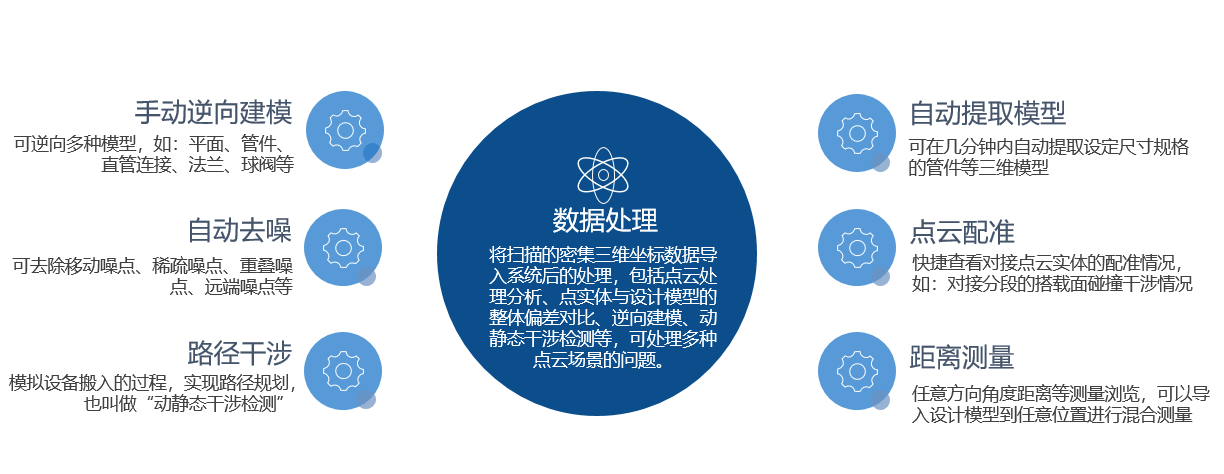
如图所示软件主要功能↑


中集来福士技术人员现场扫描↑
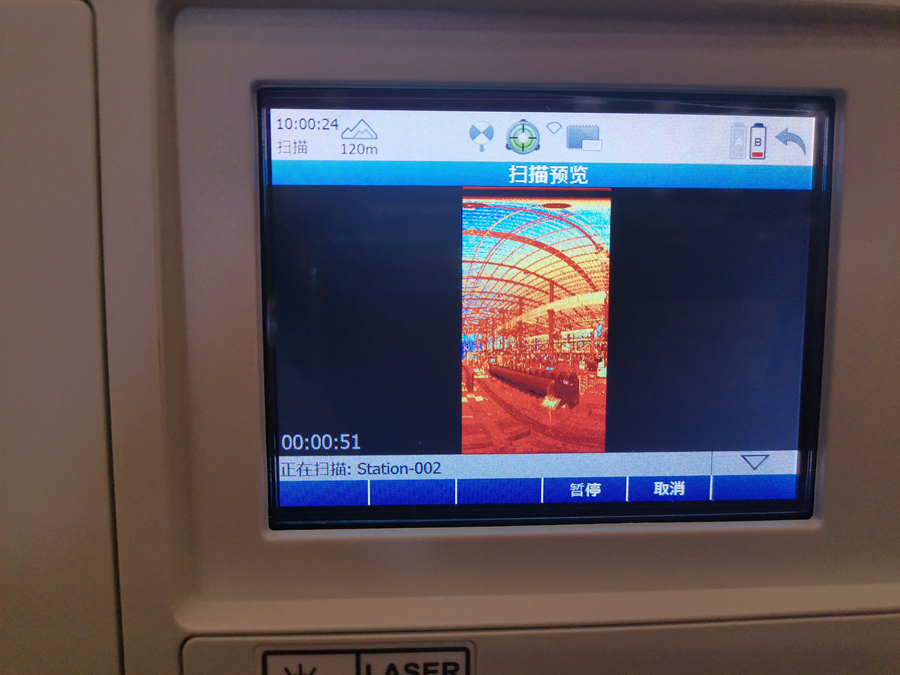
技术人员扫描结果预览↑
主要应用功能介绍:
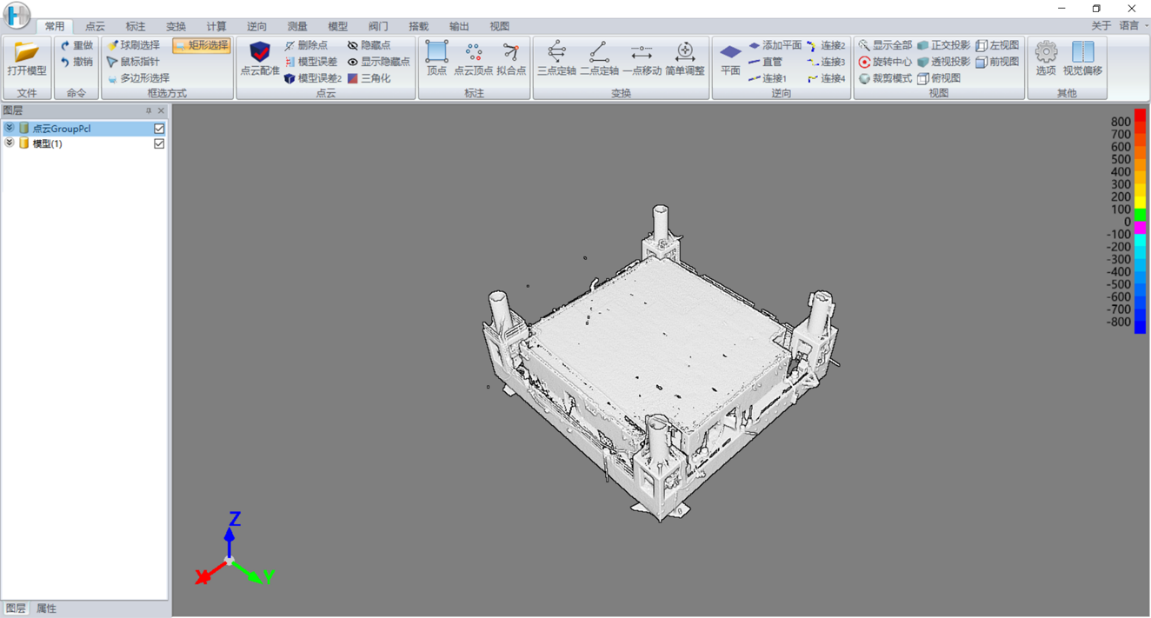
使用徕卡三维激光扫描仪对上下船体进行整体扫描,将扫描的密集三维坐标数据(点云)导入点云分析软件后,进行数据预处理,处理方法包括手动删除点、隐藏/显示点以及自动去噪,其中自动去噪可去除移动噪点、稀疏噪点、重叠噪点、远端噪点等。
可通过拟合点功能进行关键部位精度控制点的提取。
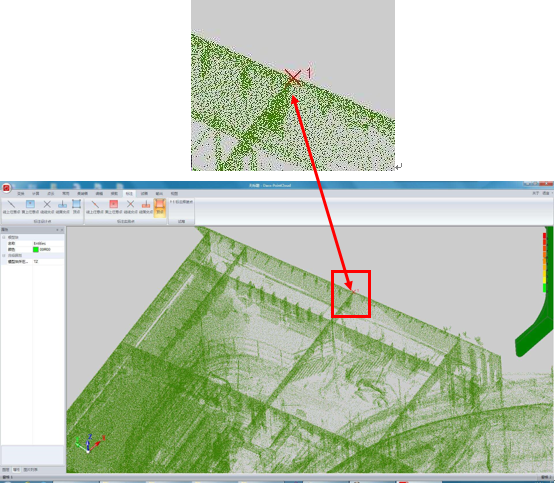
如图所示提取相关的部分点数据↑
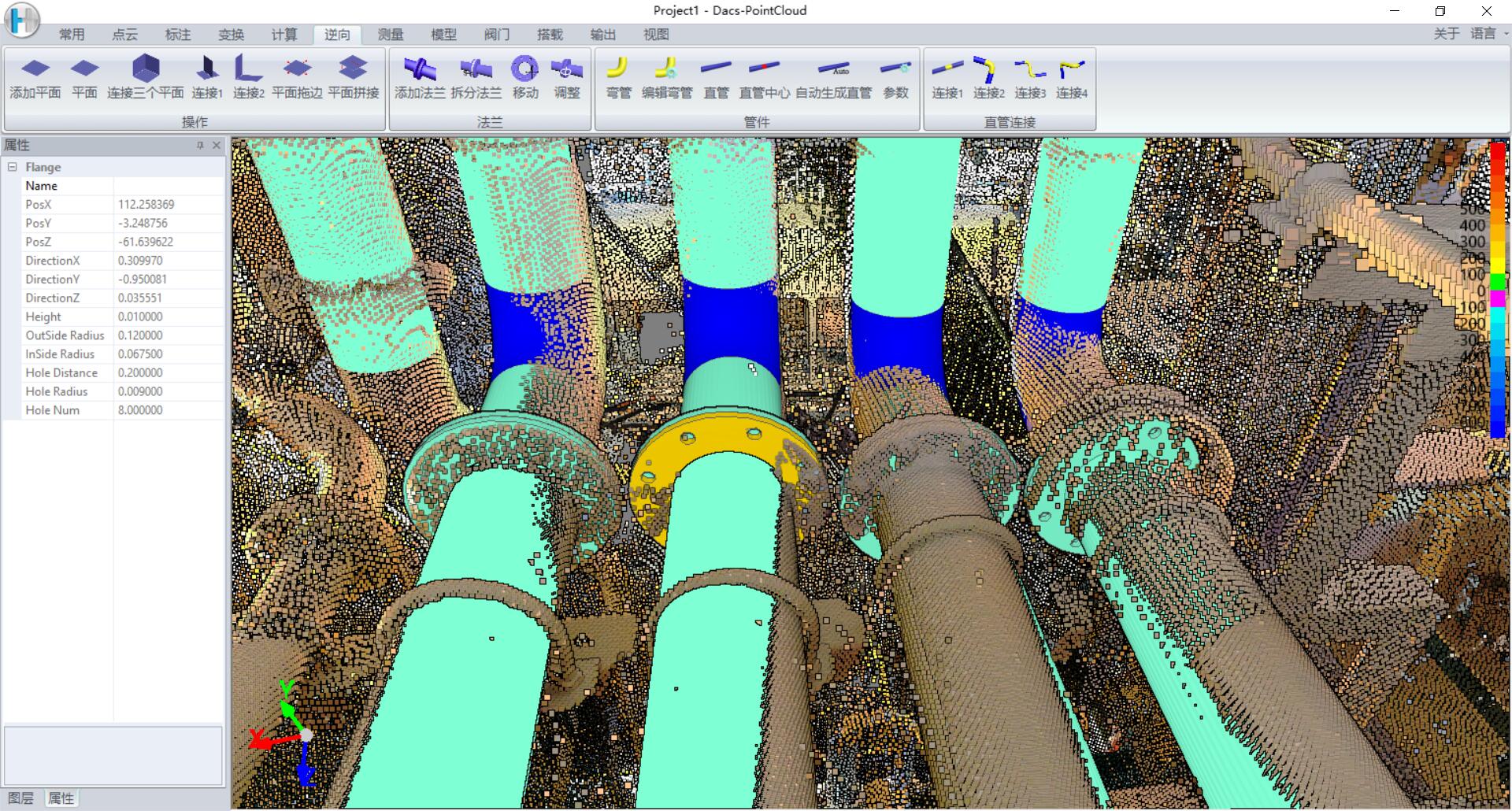
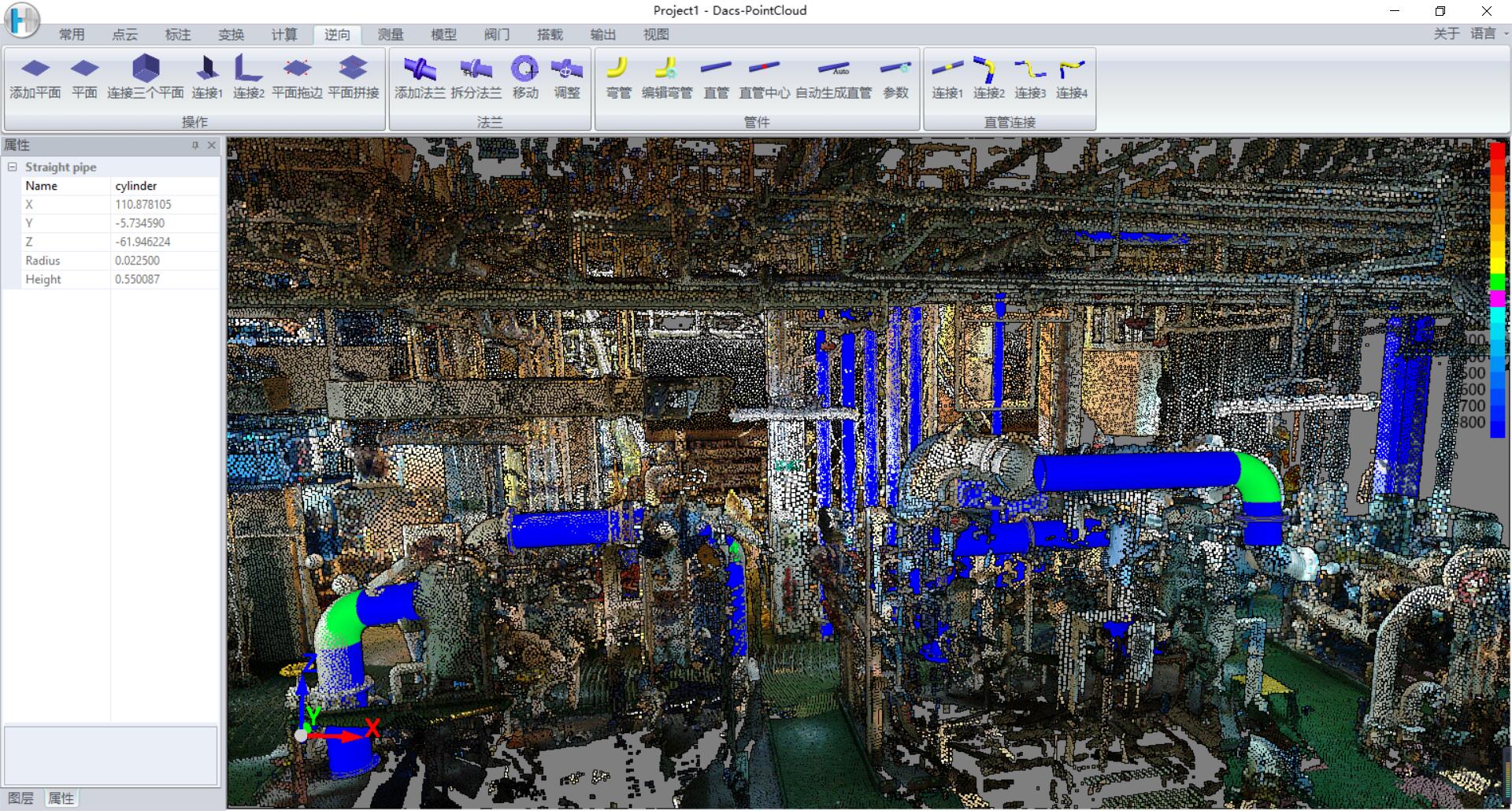
逆向建模包括手动逆向建模和自动提取模型。手动逆向建模可根据场景进行平面对象的逆向、编辑,管道对象的逆向、编辑、连接,以及实体对象的逆向建模;自动提取模型可在几分钟内自动提取设定尺寸规格的管道模型。
模型对比
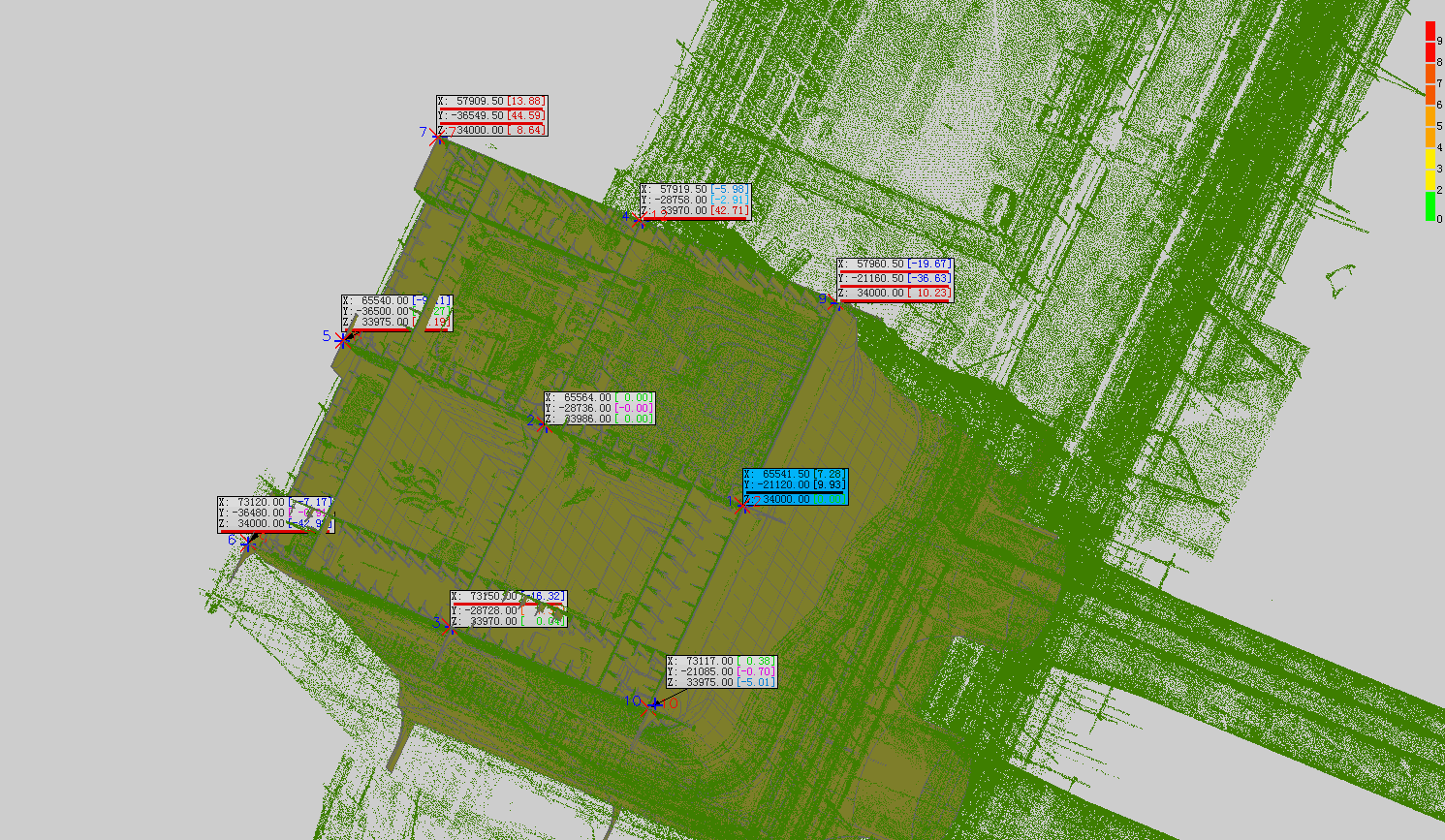
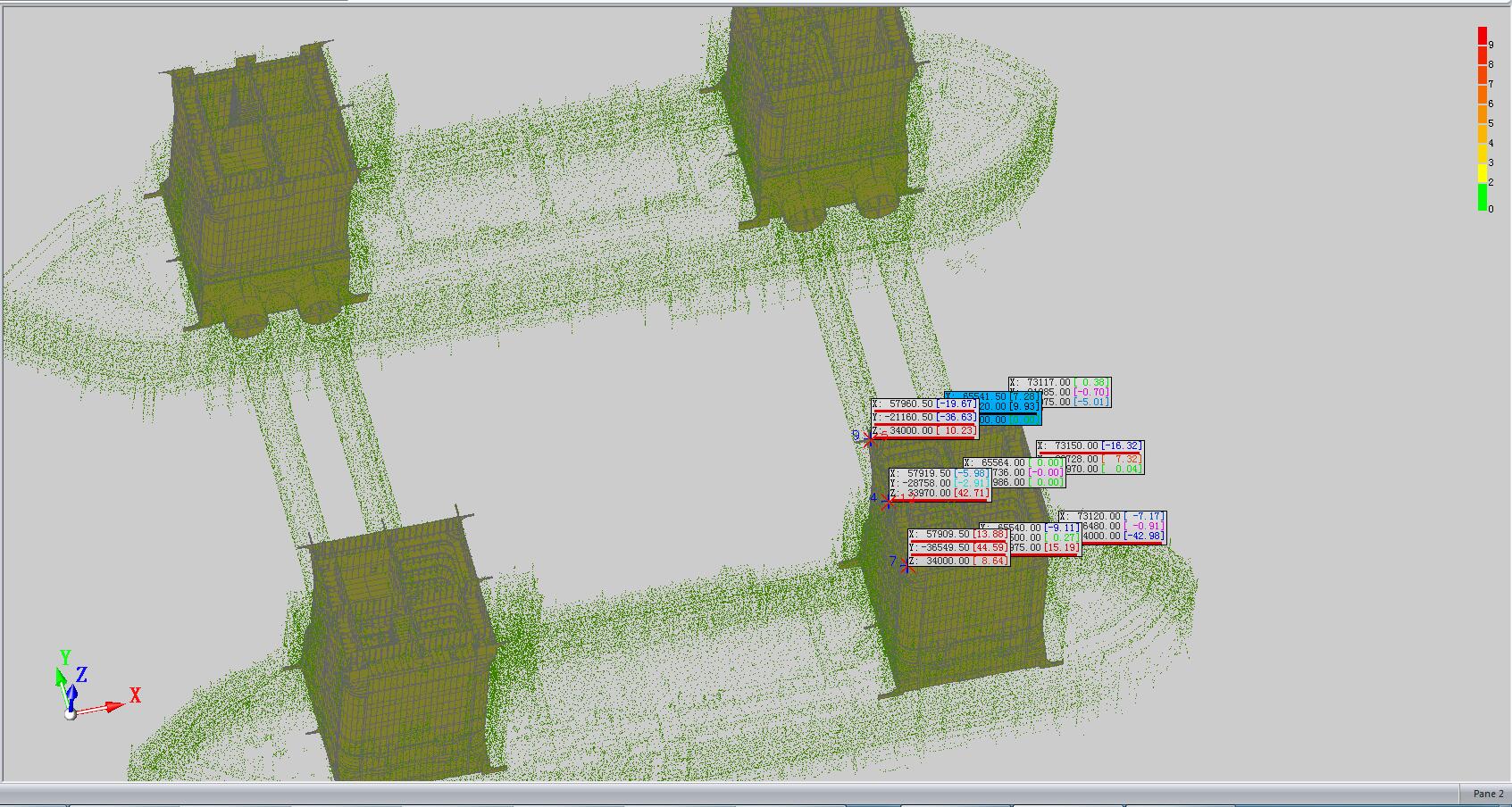
通过变换功能将设计模型与点云数据进行匹配,并可以计算出点云实体与设计模型的偏差,可手动指定模型面出具偏差。
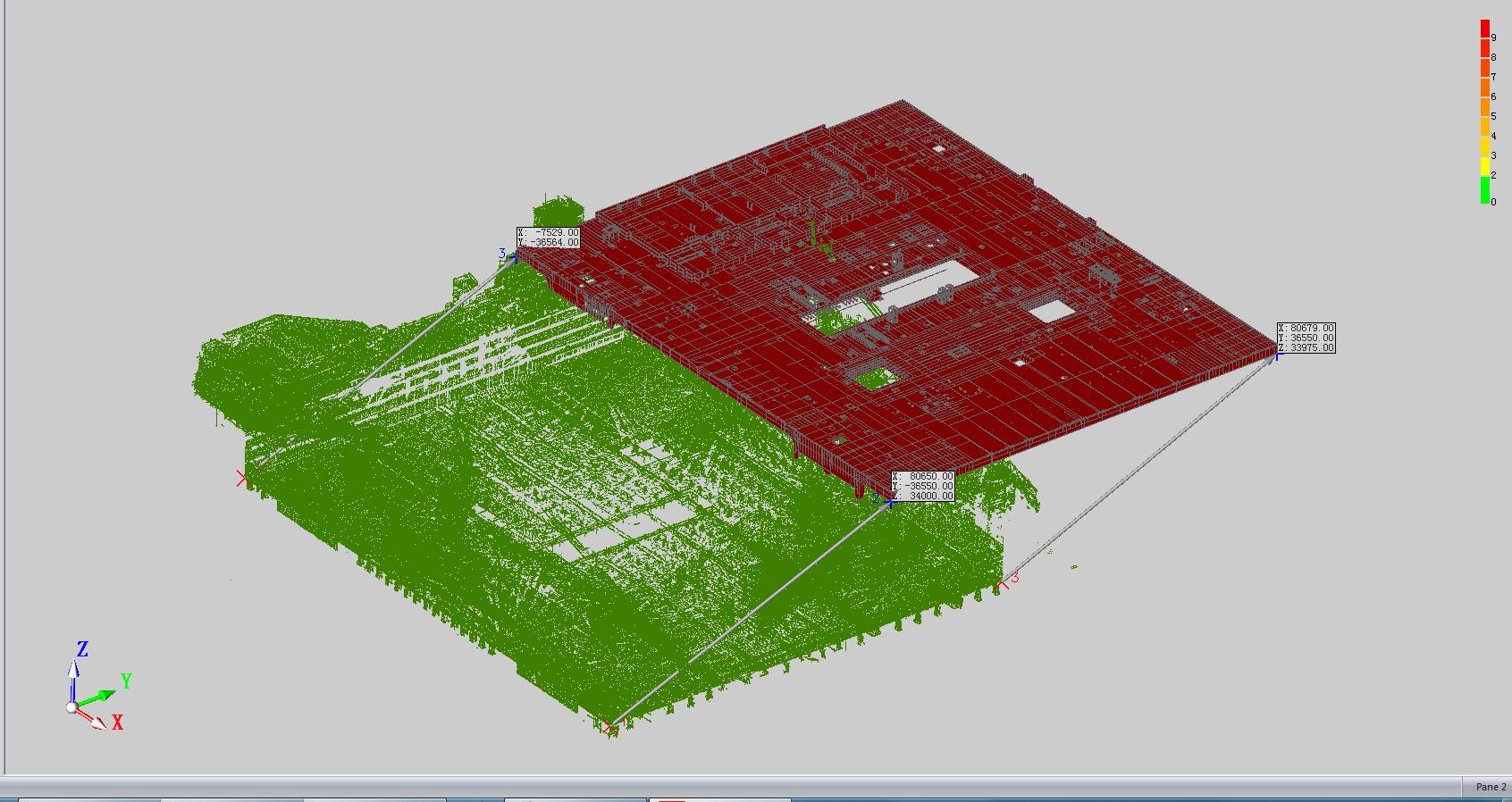
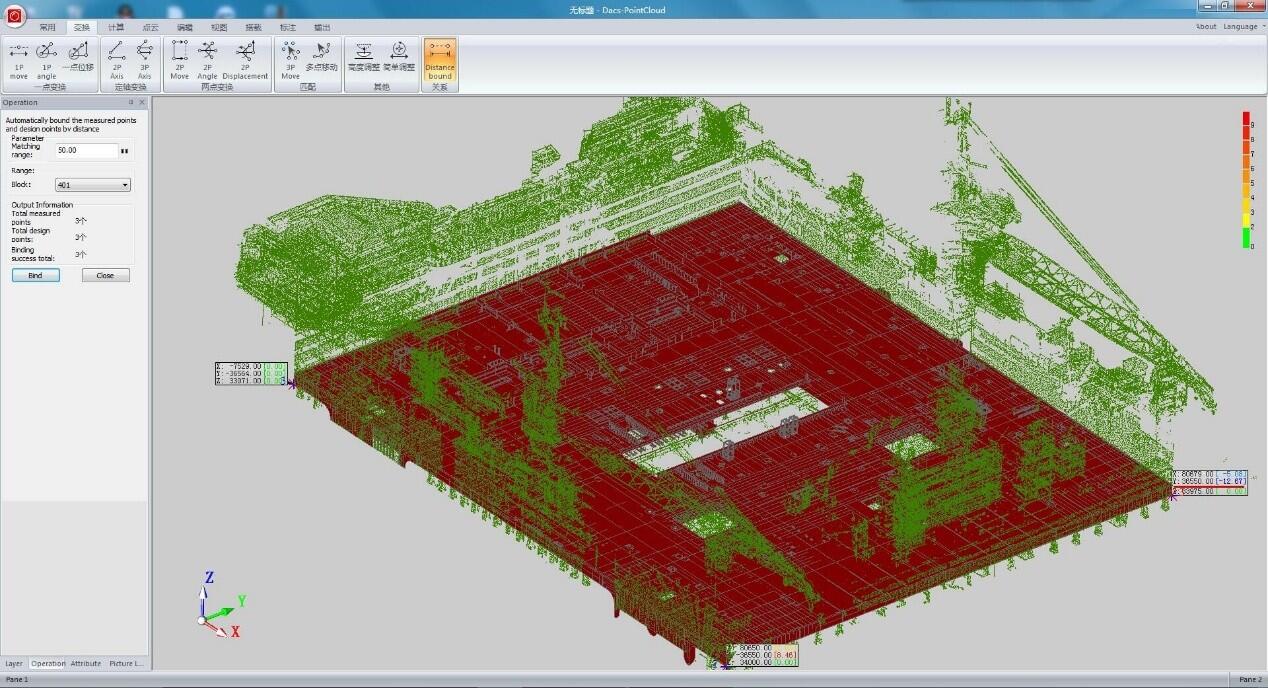
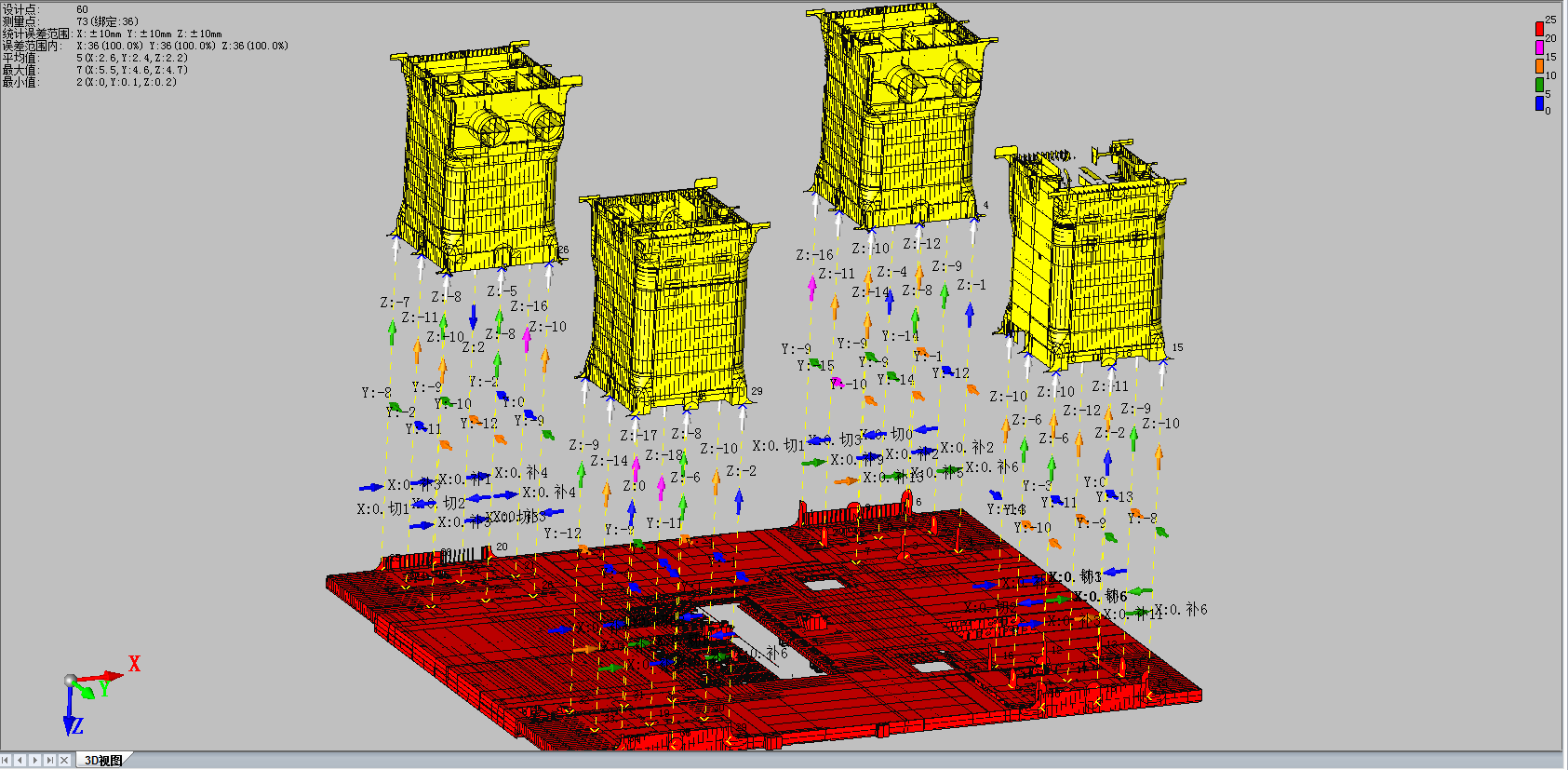
如图所示设计模型与实测三位点云数据进行匹配↑
数据输出
可以通过导出模型、生成2D报表以及截取任意截面绘制工程图,方便用户现场使用。
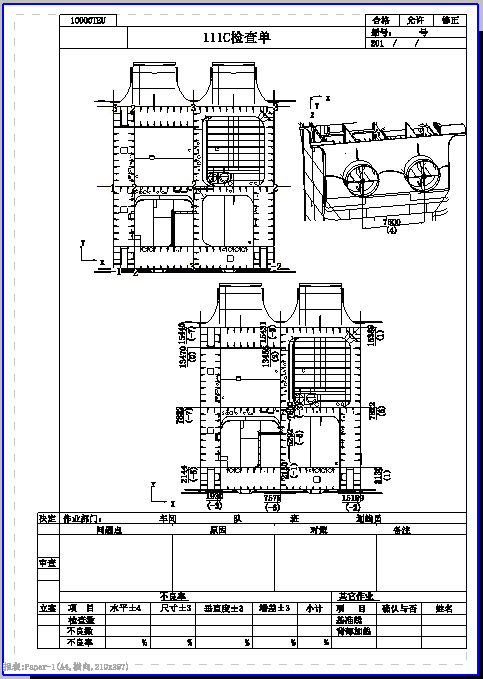
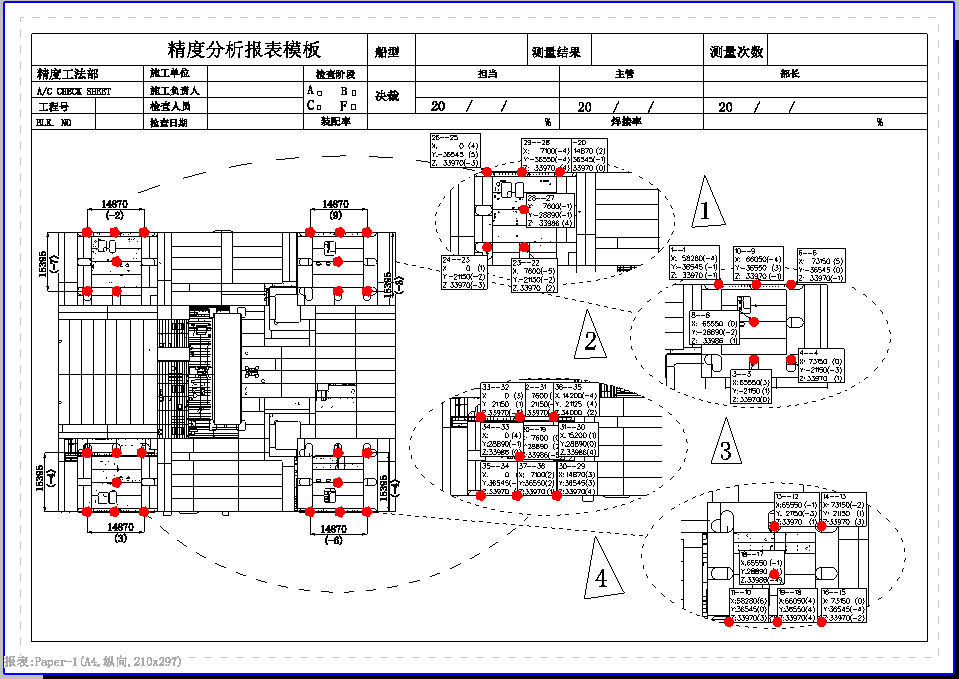
如图所示根据现场需求制定2D报表↑
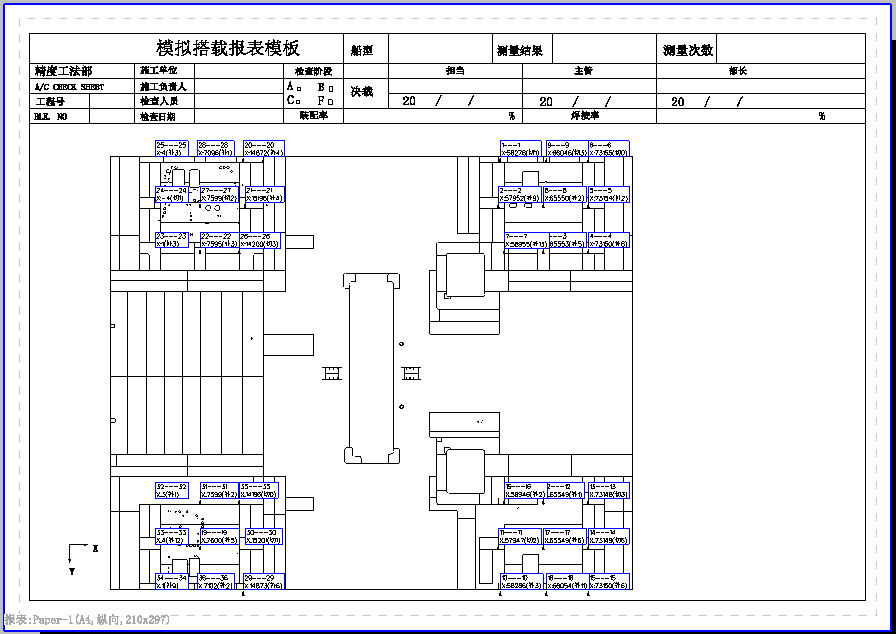
如图所示根据现场需求制定2D报表↑
将处理好的点云数据与上船体及下船体设计模型进行对比后进行上船体和下船体模拟合拢,真实反馈现场建造情况。
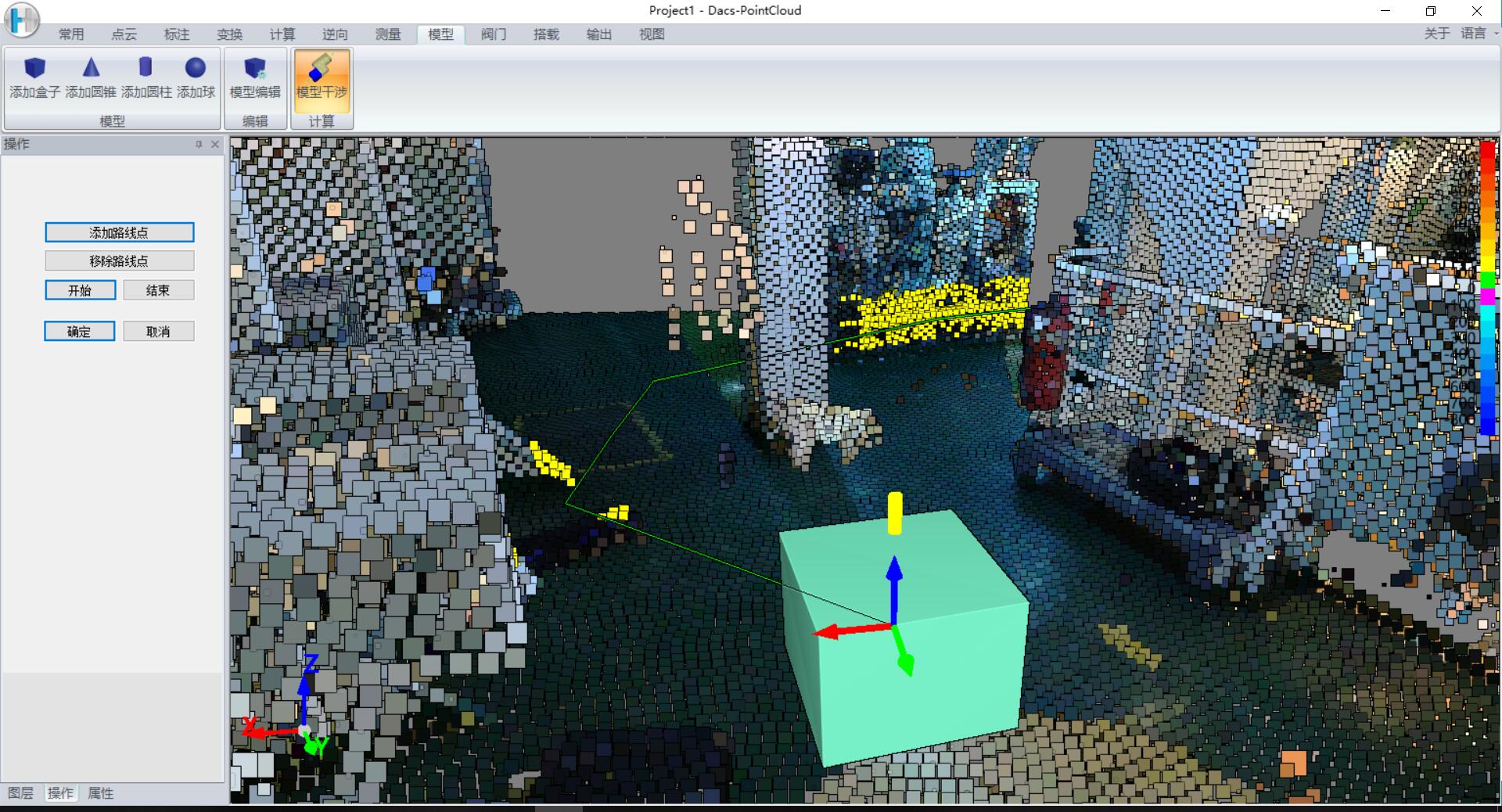
如图所示模拟现场碰撞干涉↑
动静态干涉检查
可进行设备的搬入路径碰撞检测,提前规划搬入路径。
测量设备及软件模块 |
测量设备 |
徕卡P40三维激光扫描仪 |
标靶 6 个(含6个微型脚架) |
徕卡TS60全站仪 |
软件模块 |
DACS- PointCloud点云测量与逆向建模软件 |

